使用馬達轉動感應器 | 樂高機器人EV3使用說明
使用馬達轉動感應器
馬達轉動感應器用於測量馬達的轉動量。轉動感應器內置在中型馬達、大型馬達和 NXT 馬達中。這些馬達中的感應器可以檢測旋轉量(以度爲單位)。馬達轉動一整圈是旋轉 360 度。
還可以使用馬達轉動感應器查明馬達當前運行所處的功率級別。
提示和技巧
馬達轉動感應器與連接到 EV3 主機上的馬達連接埠(A、B、C 或 D)的馬達一起使用。馬達轉動感應器不能與 EV3 感應器連接埠(1、2、3 和 4)一起使用。
馬達轉動感應器可以在程式中的任何位置重置爲零。感應器隨後測量相對於重置位置的總旋轉量。要重置馬達轉動感應器,請使用“重置”模式的馬達位置方塊。
提示和技巧
如果測量從未重置的馬達轉動感應器,則會獲取自程式開始以來馬達轉動的總旋轉量。
馬達向前旋轉會生成正度數或圈數,而向後旋轉會生成負數。始終以自感應器上次重置以來的總向前旋轉量形式來測量旋轉。會從任何累積的向前旋轉中減去向後旋轉。
下表顯示分幾個步驟進行的馬達動作的範例,以及在每個步驟之後測量馬達位置的結果。
下表顯示分幾個步驟進行的馬達動作的範例,以及在每個步驟之後測量馬達位置的結果。
| 步驟 | 動作 | 當時的馬達位置爲: |
|---|---|---|
| 1 | 程式開始,馬達尚未轉動 | 0 度 |
| 2 | 馬達向前轉動一整圈(360 度) | 360 度 |
| 3 | 馬達再次向前轉動一整圈 | 720 度 |
| 4 | 馬達向前轉動 60 度 | 780 度 |
| 5 | 馬達向後轉動 30 度 | 750 度 |
| 6 | 馬達重置 | 0 度 |
| 7 | 馬達向後轉動 100 度 | -100 度 |
| 8 | 馬達向後轉動 60 度 | -160 度 |
| 9 | 馬達向前轉動 360 度 | 200 度 |
範例 1:在推動機器人時發出聲音

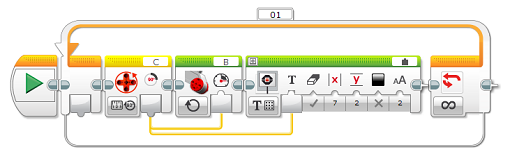
範例 2:以某種模式驅動特定距離

此程式使機器人直線驅動 2 圈,然後以之字形模式驅動總共 6.5 圈。它通過先移動一個輪子,然後移動另一個輪子,從而以之字形模式驅動。之字形模式在迴圈中重覆,直至馬達 B 驅動了總共 6.5 圈。此程式使用“馬達位置 - 圈數”模式的迴圈在馬達 B 的轉動感應器測量了總共 6.5 圈時停止迴圈。爲了使這 6.5 圈僅測量之字形驅動,而不包括開始時的 2 個直行圈數,在使用“重置”模式的馬達位置方塊進行之字形驅動之前,馬達 B 的轉動感應器會重置爲零。
範例 3:速度控制表盤
提示和技巧
如果大型馬達方塊的“功率”輸入大於 100,則會使用 100% 功率。
| 方塊 | 模式 | 用途 |
|---|---|---|
| 等待 | 馬達位置 - 比較 | 等待轉動感應器達到特定值(度數、圈數或當前功率)。 |
| 等待 | 馬達位置 - 更改 | 等待轉動感應器按特定量更改(度數、圈數或當前功率)。 |
| 迴圈 | 馬達位置 | 重覆方塊序列,直至轉動感應器達到特定值(度數、圈數或當前功率)。 |
| 選擇 | 馬達位置 | 根據轉動感應器(度數、圈數或當前功率)在兩個方塊序列之間進行選擇。 |
| 馬達位置 | 測量 | 讀取轉動感應器(度數、圈數或當前功率),並通過數字資料線獲取結果。 |
| 馬達位置 | 比較 | 將轉動感應器(度數、圈數或當前功率)與預設值進行比較,並通過邏輯資料線獲取結果。 |
| 馬達位置 | 重置 | 將轉動感應器重置爲零。 |
| 資料記錄 | 請參考“資料記錄”。 |
提示和技巧